编码器使用和速度测量原理教程
1.编码器概述
编码器是将角位移或角速度转换为一系列数字电脉冲的旋转传感器。我们可以通过编码器测量地面位移或速度信息。根据输出数据类型,编码器可分为增量编码器和绝对编码器。根据编码器检测原理,它也可以分为光学、磁、电感和电容。最常见的是光电编码器(光学)和霍尔编码器(磁性)。
2.编码器原理
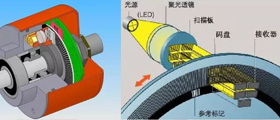
光电编码器是通过光电转换将输出轴上的机械几何位移转换为脉冲信号或数字量的传感器。光电编码器由光电编码器盘和光电探测器组成。所述光码盘被分割成一定直径的圆盘上的多个矩形孔。由于光电编码器与电机同轴,检测装置在电机旋转时检测并输出多个脉冲信号。为了判断转向,通常输出两组具有一定相位差的方波信号。
霍尔编码器是一种传感器,通过磁电转换将输出轴上的机械几何位移转换为脉冲或数字量。霍尔编码器由霍尔编码盘和霍尔元件组成。霍尔码盘在一定直径的圆板上均匀地分成不同的磁极。霍尔编码盘与电机同轴。当电机旋转时,霍尔元件检测并输出多个脉冲信号。通常,为了判断转向,输出两组具有一定相位差的方波信号。
可以看出,这两种原理的编码器的目的是获得AB相位输出的方波信号,使用方法是相同的。下面是一个简单的方案。
3.编码器接线说明
具体到我们的编码器电机,我们可以看看实际的编码器。
这是一个增量输出霍尔编码器,编码器有AB相位输出。因此,你不仅可以测量速度,还可以识别方向盘。按照上图中的接线说明,我们只需要为编码器电源提供5V电压。当电机旋转时,方波信号可以通过AB相位输出。编码器有自己的上拉电阻器,因此可以直接连接到微控制器IO进行读取,而无需外部上拉。
4.编码器的软件四倍频技术
让我们来谈谈编码器的倍频原理。在下面,为了提高每个人的学习兴趣,让我们首先明确这是一项实用的技术。它可以将编码器的精度提高4倍。这种效果更像是静止相机上的光学变焦,而不是数码变焦,数码变焦以牺牲清晰度为代价放大图像。下面是编码器输出波形图。
这里我们使用软件方法来实现四倍的频率。首先,我们可以在上图中看到编码器输出的AB相位波形。在正常情况下,当我们使用M方法测量速度时,我们将测量单位时间内从A相输出的脉冲数。获取速度信息。在传统方法中,我们只测量A相(或B相)的上升沿或下降沿,这是上图中相应数字1234之一,因此只能计数三次。四倍频法包括测量A相和B相编码器的上升沿或下降沿。这样,它可以同时计数12次(1234的3个周期)。这就是软件翻两番的原理。
5.MCU如何收集编码器数据
由于编码器的输出是标准方波,我们可以使用微控制器直接读取它。软件中有两种处理方法:具有自身编码器接口的微控制器,如STM32,可以直接使用硬件技术。没有编码器接口的MCU,如B.51 MCU,可以通过外部中断读取。例如,编码器相位A输出连接到MCU的外部中断输入端口,因此可以通过转换边缘触发中断。然后在函数中相应的外部中断服务,正反转由B相的电平决定。例如,如果当B相位较高时,A相位有一个过渡边,则将其视为正向旋转,低电平视为反向旋转。
了解更多关于编码器常识,敬请关注西安德伍拓自动化传动系统有限公司网站,我公司为广大新老用户免费提供编码器技术支持,欢迎垂询。




 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn