带您了解舞台机械控制神器:
编码器!
目前,作为一个重要的传感器,编码器在舞台机应用中占据着越来越重要的位置。舞台机械的正确运动在很大程度上取决于编码器安装的可靠性、电信号传输的稳定性以及计数单元的精度。编码器有很多种,最常见的是增量编码器和绝对值编码器,绝对值编码器分为单匝绝对值编码器和多匝绝对值编码器。根据编码器的内部工作原理,区别可分为磁性编码器和光电编码器。
舞台机械应用程序经常会出现编码器使用问题,例如多轴驱动器提升阶段。您需要选择哪种类型的编码器,是增量编码器还是绝对编码器。在成本方面可以使用磁性编码器吗?考虑到这些实际问题,本文将根据编码器的技术特性分析阶段计算机在应用程序中的选择、安装和使用方法。
一、编码器的技术特点
1、编码器的工作原理
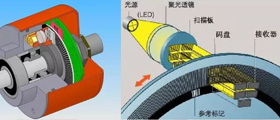
编码器主要根据内部工作原理分为光电编码器和磁性编码器两种类型,如图1所示。
光电编码器的主要工作原理是通过光电转换将输出轴的机械几何位移转换为脉冲或数字传感器,主要由光栅盘和光电传感器件构成。在伺服系统中,由于光栅盘与电机同轴,电机的旋转驱动光栅盘的旋转,通过光电检测装置输出若干脉冲信号,可计算当前电机速度。根据信号每秒的脉冲数。光电编码器码盘,输出相位差90°的2个光代码,根据双通道输出光代码的状态变化能判断电动机的旋转方向。
磁性编码器的结构主要是在编码器的旋转轴的一端设置产生磁场的永久磁铁,将霍尔传感器芯片放置在电路板上,根据特定条件接近编码器轴的一端。要求。(方向和距离)如图3所示,块体的永久磁铁通过分析通过电路板输出的霍尔传感器的电压信号,可以识别编码器转子的旋转位置。
2、编码器的信号输出方式
根据编码器信号的输出类型,一般分为增量编码器和绝对值编码器。
增量编码器被广泛使用,一般的增量编码器主要是脉冲输出类型。位移转换为周期性电信号,然后转换为计数脉冲,脉冲的数量用于表示位移的大小。通常是A相、B相、Z相的输出,其中A相和B相是延迟了其他1/4周期的脉冲输出。可以区分后部,使上升和上升的B阶段和下降边为2或4倍。Z阶段为单脉冲。也就是说,每转一圈就发送一个脉冲。
绝对式编码器可分为单匝绝对式编码器和多匝绝对式编码器。它们通常使用通信方式与驱动器单元(如PLC或SSI、PROFINET或CANO PEN)交换数据。单匝绝对式编码器通常只能注册编码器单匝的绝对位置,常用于执行单匝旋转运动的组件。多匝编码器有广泛的用途,可以记录编码器实际旋转的转速。
实现多匝数检测的多匝绝对式编码器方式主要有电池计数寄存器、机械式齿轮旋转编码等。
电池计数寄存器的原理很简单。也就是说,使用安装在编码器中的微处理器记录、计算和保存编码器的转速。电池的功能是让编码器能够继续储存和记录转速。
与机械齿轮多涡轮编码器中的时钟齿轮类似的齿轮传动结构,即一系列减速齿轮组,与主机械轴分阶段啮合,每个级齿轮包括前齿轮和主机械轴。有整数倍的削减率的关系。通过确定各齿轮的旋转角位置,可以检测编码器主机械轴的转速。机械齿轮多涡轮编码器的绝对位置反馈输出不是根据过去的记录计算的,而是根据当前的机械物理传递机制直接测量的。不需要电池,不受线路干扰等外部环境的影响。以及程序错误信号反馈安全从位置检测源获取。
二、编码器的安装和使用
1、编码器的选型
与传统的光学编码器相比,磁性编码器不需要复杂的码盘或光源,组件少,传感结构简单。同时,霍尔元件本身也有许多优点,比如坚固的结构、小巧、轻巧、长寿命、抗振动性、不怕灰尘、油、水蒸气和盐水喷雾造成的污染和腐蚀。
当然,磁性编码器也存在某些缺点,如易受电磁干扰影响。为了避免温度漂移,需要采取补偿和保护对策。此外,另一个难以解决的问题是位置反馈。在磁性编码器方式中,为了进行绝对位置反馈,需要在编码器内添加信息处理单元和位置存储器单元。特别是在位置存储器的情况下,通常需要追加电力保持用的电池。但是,这种方法有几个缺点。例如,如果电池放电,则位置会丢失。
在舞台机行业,由于现场有大量的机械设备,所以通常稳定性是主要要求,所以编码器的选择一般使用光电编码器。
2、编码器的安装位置
编码器的安装方法有几种,有安装在电机轴上的方法、安装在齿轮箱轴上的方法、拉索等安装方法。
编码器主要安装在电机尾轴上,以实现闭环速度控制。逆变器可以通过编码器实时计算并获取电机的当前运动,并相应调整速度。例如,驱动器希望以1200rpm的速度稳定电动机输出,但当前实际电动机速度为1150rpm。驱动器可以获取电机输出轴编码器值,以了解实际电机电流速度不是1200rpm,并调整环路电流,将速度提高到1200rpm。在此过程中,如果由于其他原因无法提高速度,则逆变器将发出相应的警报。使用速度闭环有很多优点。例如,可以在不同的负载条件下以相同的特性运行电动机,这有助于调整位置循环。
在舞台机应用程序中,通常需要在电机的尾轴上安装单独的增量编码器以进行速度调整,该编码器常用于位置调整。对于仅安装了一个编码器的低速驱动轴(如减速机输出轴的位置),通常不可能完成速度闭环,只能执行大致位置的闭环。精度和响应速度不够,负荷变化很大。答案是有区别的。
安装在电机尾轴上的编码器通常有小型半套筒式编码器和通孔式编码器。根据实际应用程序的情况,这两种类型的增量编码器都可以获得良好的结果。操作松动或晃动不明显,均可使用。但是,在将飞轮安装到电机尾轴上的应用程序中,只能选择通孔编码器。
3、双编码器安装方法
双编码器通常使用增量绝对值和多匝绝对值的组合。还有两种增量配置方法。设备的两个编码器通常具有不同的功能。其中增量编码器主要用于速度循环调整(大多数逆变器只支持使用增量编码器进行速度闭环,而一些逆变器也支持使用编码器多。旋转绝对值进行速度循环调整);第二个编码器用于定位。
为了达到SIL3的安全水平,需要在系统中装备2个编码器来比较编码器。当一个编码器发生故障时,可以快速判断机器异常,防止特定编码器损坏造成危险情况的发生。
但是,某些应用程序(例如,当多个电动机驱动同一个刚性设备时)采用增量等离子体多涡轮绝对式编码器的配置方法,多匝绝对式编码器通常安装在运行时部分。使用电缆传感器或安装到最终驱动器的运行端,测量最终位置并精确比较多个设备之间的位置。在这种情况下,如果没有安装多匝绝对式编码器,增量编码器将继续积累错误,导致多个驱动器之间的结束位置偏移,导致设备倾斜或不均匀的力等危险情况。
现在有双输出编码器。也就是说,一个编码器可以输出增量式和多匝绝对值两个信号,可以均等地安装在电机尾部的轴上。安装过程简单方便。但是,该设置方法通常会出现增量输出信号和多匝绝对值输出信号同时发生的问题。例如,由于轴松动,两个编码器信号同时出现异常。异常结束时间。为了避免这些问题,可以使用单独的编码器(例如安装增量编码器)将两个编码器安装到不同的位置。
在电机的尾轴上,在减速机的轴等上安装了多匝绝对式编码器。
三、结论
在舞台机械的用途中,关于编码器的选择没有得出结论,但一般情况下,使用的编码器的种类根据用途而决定。在选定时,不仅要考虑编码器的性能指标,还要考虑价格和使用环境。由于安全要求的改善,考虑使用双编码器,慢慢地变成趋势。舞台机器的趋势。
了解更多关于编码器在舞台机械方面的应用,请关注西安德伍拓自动化传动系统有限公司网站。公司专业技术团队为您免费提供
编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取“线上+线下”服务的服务形式,帮助企业解决技术难题。




 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn