齿轮式绝对值编码器的结构与工作原理
齿轮式绝对值编码器的断电记忆功能通过其独特的机械结构和数据存储机制实现,以下西安德伍拓自动化从其内部结构和工作原理二方面进行详细解析:
齿轮式绝对值编码器的断电记忆功能依赖于其独特的机械结构设计,通过齿轮组的物理位置记录旋转圈数,结合单圈绝对位置编码,实现断电后位置信息的无损存储。

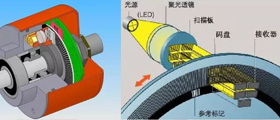
图为某款齿轮式绝对值编码器的齿轮结构示意图
齿轮式绝对值编码器的结构
齿轮式绝对值编码器由单圈绝对值编码模块和多圈齿轮传动模块两部分构成。
单圈编码模块:
采用光电或磁电编码技术,在编码盘上刻有独特的绝对位置码道(如格雷码)。转轴每旋转一圈,传感器直接读取码道图案,输出唯一的数字信号,确定轴在单圈内的绝对角度位置(如0°~360°)。
多圈齿轮传动模块:
通过多级减速齿轮组(通常为2~4级)将主轴的旋转运动传递至各级齿轮。例如:
一级齿轮:主轴每转1圈,一级齿轮转动1个齿(假设齿轮有10齿,则一级齿轮转1圈需主轴转10圈)。
二级齿轮:一级齿轮转1圈,带动二级齿轮转动1个齿(同理,二级齿轮转1圈需一级齿轮转10圈,即主轴转10×10=100圈)。
依此类推,通过齿轮减速比逐级放大圈数记录范围(如三级齿轮可记录10×10×10=1000圈)。
齿轮式绝对值编码器的工作原理
多级齿轮传动结构
编码器内部采用类似钟表的精密齿轮组,多级齿轮与主轴逐级啮合,每级齿轮的减速比按整数倍设计(如1:16、1:256等)。当主轴旋转时,末级齿轮的角位置变化被传感器捕捉,通过齿轮传动比计算出总圈数。例如,若某级齿轮减速比为1:4096,主轴旋转4096圈后,末级齿轮仅旋转一圈,编码器通过检测末级齿轮位置即可确定总圈数。
实时位置编码
光电或磁电传感器实时读取齿轮组的角度信息,并将其转换为唯一的数字编码(如格雷码)。每个位置对应一个确定的编码值,无需依赖历史数据计算,直接反映当前机械位置。
齿轮式绝对值编码器通过机械齿轮组的物理位置锁定与单圈绝对编码的结合,实现了无需外部电源的断电位置记忆。其无源、高可靠的设计使其在工业自动化、能源设备等关键领域成为不可替代的位置传感解决方案,尤其在电池维护困难或环境恶劣的场景中优势显著。
了解更多
编码器相关知识,敬请关注西安德伍拓自动化传动系统有限公司网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn