增量式编码器能否实现绝对定位?
在日常的工业应用与电机控制领域,一个常见问题备受关注:增量式编码器能否实现绝对定位?要解答这个问题,我们需先了解增量式编码器的工作原理,再探讨其与绝对定位的关系,最后结合实际应用中的考量因素来综合分析。

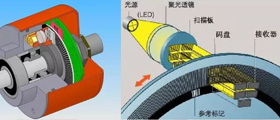
图为HENGSTLER RI76TD系列增量式编码器照片
增量式编码器工作原理
增量式编码器是一种用于确定位置的装置,它通过测量轴相对于某一参考点的变化量来实现定位。其内部构造包含一个旋转的光栅或磁栅,以及与之配合的光电传感器或磁传感器。当电机轴开始旋转时,光栅或磁栅的位置会随之改变,传感器会敏锐地捕捉到这些变化,并将其转化为电信号。这些电信号以脉冲的形式输出,通过对脉冲数量和频率的分析,我们就能测量出轴的运动情况以及相对于参考点的位置变化。不过,增量式编码器存在一个明显的局限性,它只能测量位置相对于参考点的变化量。这就意味着,一旦系统重新启动,就需要重新校准参考点,否则无法准确知晓轴的绝对位置。
增量式编码器与绝对定位
既然增量式编码器本身只能测量相对位置变化,那么它所驱动的电机能否实现绝对定位呢?答案是肯定的,但需要借助一些额外的步骤或设备。
确定固定参考点
要实现绝对定位,在系统启动时,必须先确定一个固定的参考点。这通常可以通过两种方式来完成。一种是寻找一个特定的标记,比如机械结构上的一个固定凸起或凹陷,当编码器检测到这个标记时,就将其设定为参考点。另一种是执行一个特定的机械动作,例如让电机轴转动到一个已知的极限位置,然后以此位置作为参考点。一旦参考点设定完成,增量式编码器就可以从该点开始,累积记录轴的位置变化,从而追踪出实际的绝对位置。
结合电池备份或外部存储设备
为了进一步提高绝对定位的可靠性,还可以结合使用电池备份的编码器或外部存储设备。电池备份的编码器能够在断电时继续保持对位置信息的记忆,当系统重新通电后,编码器可以直接提供断电前的位置数据。而外部存储设备则可以在系统正常运行时,定期将位置信息保存起来。这样,即使在断电或重启后,系统也能从存储设备中读取之前的位置信息,恢复到断电前的状态,从而实现绝对定位。
使用“伪绝对”编码器
除了上述方法,还可以使用“伪绝对”编码器。这种编码器在内部集成了特殊的电路和算法,能够将增量值转换为绝对值。它的工作原理是在编码器内部建立一个虚拟的绝对位置坐标系,通过对增量信号的持续处理和计算,实时更新绝对位置信息。“伪绝对”编码器的优点是可以在不需要外部参考点的情况下提供绝对位置信息,但它的成本相对较高,内部结构也更为复杂。
实际应用中增量式编码器实现绝对定位需要考虑的因素
在实际应用中,选择使用增量式编码器还是绝对式编码器,需要综合考虑多个因素,其中具体需求和预算是最为关键的两个方面。
增量式编码器具有成本较低和结构简单的优势。对于一些对定位精度要求不是特别高,且预算有限的应用场景,增量式编码器是一个不错的选择。然而,它也存在一些缺点,比如需要定期校准,因为随着使用时间的增加和环境因素(如温度、湿度、振动等)的变化,编码器的测量准确性可能会受到影响。
绝对式编码器则能够提供更准确和可靠的位置信息。它不需要像增量式编码器那样在系统启动时进行校准,能够在任何时候直接给出轴的绝对位置。但是,绝对式编码器的成本较高,这在一定程度上限制了它的应用范围。
综上所述,虽然增量式编码器本身并不直接提供绝对位置信息,但通过结合确定固定参考点、使用电池备份或外部存储设备、采用“伪绝对”编码器等技术或设备,我们仍然可以让增量式编码器电机实现绝对定位功能。在实际选择编码器时,应根据具体的应用场景、定位精度要求、预算等因素进行全面权衡,以找到最适合的解决方案。
了解更多
编码器相关知识,敬请关注西安德伍拓自动化传动系统有限公司网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn