机器人关节
编码器零位确定通俗讲解
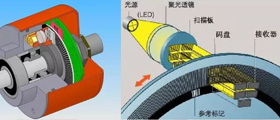
机械腿的三个关节都装了带 A、B、Z 三相的普通增量式编码器,每次调试时怎么让编码器回到 “真正的零点” 呢?先说说原理:这类编码器记录的位置,是从它上电瞬间自动设定的 “伪零点” 开始算的,但这个零点不一定是你想要的机器人实际零点(“真零点”)。

图为机器人关节内部结构及编码器安装照片
怎么找到 “真零点”?两种实用方案:
1. 加个辅助传感器帮忙定位
可以额外装个传感器来算 “伪零点” 和 “真零点” 的位置差,比如:
绝对编码器:直接能读出绝对位置,精度高;
光电开关 / 机械按钮:当关节转到特定位置时,传感器触发,记录此时的位置差。
虽然不同传感器精度有高有低,但只要能找到你想设的 “真零点” 就行(可能有点误差,但够用)。
2. 让关节 “撞限位” 反推零点
不用额外装传感器,让关节慢慢动,直到碰到机械限位,这时候电机力矩会突然变大。记录下撞限位时的位置,再反推出 “真零点” 该在的位置。举个例子:假设撞限位时位置是 100 度,而你想让 “真零点” 在限位前 20 度的位置,那差值就是 20 度,标定后就能通过编码器的相对位置算出实际绝对位置了。
不过这个方法误差可能更大,而且一定要保证机械结构够结实,别撞坏了!
想让编码器从 “伪零点” 对准 “真零点”,要么加传感器直接测差值,要么让关节撞限位算差值,标定后就能用相对位置算出实际位置啦~
了解更多
机器人关节编码器相关知识,敬请关注西安德伍拓自动化传动系统有限公司网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn