编码器在大型船舶龙门起重机中的应用
针对大型船舶龙门起重机承载能力大、跨度大、起升高度高的特点,这里为大家介绍编码器在起重机闭环同步控制和行程测量中的应用,使起重机能够安全可靠地工作。对同类起重机的设计具有参考和借鉴意义。
摘要
大型船舶龙门起重机(以下简称船舶龙门起重机)作为码头区停工不可或缺的起重设备,已朝着超大跨度、超大承载能力的方向发展。目前,我国大型造船龙门起重机的承载能力达到1600吨,跨度230米,起吊高度100米。这对起重机操作中控制位置的同步定位和安全工作提出了更高的要求。龙门起重机跨度大,结构形状的刚性支腿和柔性支腿导致腹板两侧异步运行,容易发生安全事故。龙门起重机吊装高度大,给定位吊装作业带来很大困难。编码器可用于定位、速度和长度测量,广泛应用于大型造船龙门起重机
编码器简介
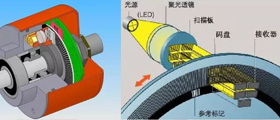
编码器是一种将物理量转换为数字格式的传感器,用于检测物体机械运动的速度、位置、角度和计数。运动控制器中旋转编码器的功能是将位置和角度等参数转换为数字量。可以使用诸如电接触、磁效应、电容效应和光电转换之类的机制来形成不同类型的编码器。运动控制系统中最常见的编码器是光电编码器。光电子编码可以分为增量编码器和绝对编码器。两者通常用作速度控制或位置控制中的检测部件。
增量编码器
增量编码器直接利用光电转换原理输出A、B、Z三组方波脉冲。两个脉冲组A和B之间的相位差为90°,因此可以很容易地确定旋转方向。Z相每转输出一个脉冲用于参考点定位。当编码器旋转时,它会发出脉冲,并通过计数设备知道它的位置和速度。当编码器静止或关闭时,依靠计数器的内部存储器来记住其位置。通过这种方式,编码器在电源故障后不能以任何方式移动。如果有当前调用,编码器的输出脉冲过程中应该没有干扰,并且脉冲不应该丢失。否则,由计数装置存储的零点偏移,并且偏移量可能是未知的。只有当出现错误的生产结果时,才能知道。其优点是结构简单,平均使用寿命长,抗干扰能力强,可靠性高,适用于连续操作和高精度定位控制。其缺点是不能输出波旋转的绝对位置信息。
绝对值编码器
绝对编码器是一种直接输出数字量的传感器。在圆形码盘上,沿径向有几个同心的码道,每个都由透明和不透明的扇区区域组成。相邻代码轨道的数量是双重关系,代码盘上的代码轨道数量是二进制数字的数量。绝对编码器根据其机械位置来确定每个位置的唯一性。它不需要内存、参考点和连续计数。如果需要知道位置,他会读取位置。这显著提高了编码器的抗干扰性能和数据可靠性。由于绝对编码器相对于增量编码器在定位方面的显著优势,它们越来越多地用于机械运动定位。其优点是可以直接读取角坐标的绝对值,而不会累积误差,并且在关闭电源后不会丢失位置信息。然而,分辨率由二进制系统中的位数决定,精度取决于位数。
因此,增量编码器和绝对编码器之间的区别在于,增量编码器将位移转换为周期性电信号,然后将其转换为计数脉冲。脉冲的数量用于表示偏移的大小,但只能在打开时存储,而绝对编码器的每个位置都对应于特定的数字代码。其指示仅指测量的开始和结束位置,与测量的中间过程无关。而且它有内置存储器,可以在断电时存储计数值。因此,绝对值编码器更昂贵。如果编码器的计数存储器安装在电子控制中,则可以使用增量编码器来代替绝对编码器。
编码器实现闭环和同步控制
由于大型造船龙门起重机吊装工艺的要求,通常在上车架上放置两套起重机构进行配合,同时与下车架的起重机构一起进行吊装和倒置,对吊装的同步性要求较高。在变频电气控制中,增量编码器通常用于电机的同轴安装。编码器的仪表和输出连接到电子控制系统,用于闭环调节。电子控制系统可以通过调节闭环控制来精确控制电机速度,达到精确控制机构速度的效果。当两组相似的机构需要同步时,电子控制系统可以通过双闭环系统实现机构速度的同步,以确保提升和提升的安全。同时,这种控制方法也被用于行走机构中,以确保同步和安全行走。
大型造船龙门起重机的行程测量主要包括测量行程高度和测量行程距离,而行程测量一般使用绝对编码器。原则上,电机同轴编码器也可以进行行程测量。但不建议使用。一方面,虽然电机和机构在安装完成时形成线性关系,但在维修过程中拆卸或调整时,转速和驱动位置之间的对应比例可以改变,这也可以通过调整电子控制系统的参数或重新设置限制来解决;另一方面,用于电机的通用同轴编码器使用增量编码器,在电源故障的情况下,增量编码器可能会失去其驱动位置。也可以安装内部存储来解决这个问题。但这些方法不如绝对值编码器可靠。
所有编码器行程测量都是通过测量传动链中的转数或角度并将其转换为速度输出来实现的。行程位置由编码器在传动链中的位置与待测量行程之间的线性关系确定。机构的速度也可以通过与系统中的时间参数进行比较来确定。同时,在上述类型中也可以获得一些特殊的控制参数。

用于测量提升高度的旋转编码器通常安装在提升绞车卷筒的轴端,与卷筒转数成线性比例。如图1所示,齿轮箱转向和鼓通过离合器连接。齿轮箱转向箱输出端的一侧安装有旋转编码器,用于测量行程高度,另一侧安装有行程高度限制器,用于限制终点。如果卷筒是多层缠绕机,编码器的转速和提升高度不是线性连接的。如果层数发生变化,可能会发生突然的变化。设置程序时,有必要根据转数确定钢丝绳的位置,调整比例,并准确测量提升高度。除了吊钩的高度测量外,在多钩系统中,提升高度测量还起到提升行程的同步功能。行程高度测量误差可以通过使用低于行程高度的减速位置或增加路径中心的极限位置来重置。
起重机行程测量
门式起重机两侧的起重机运行系统均配有行程测量装置。一方面,它可以提供系统驱动信号,以确定起重机在轨道上的位置;另一方面,系统可以比较两侧的路径来控制驱动同步误差,以避免由于两侧操作的大偏差而导致结构过载或脱轨。

传统的大型车辆行驶路径测量通常使用独立的检测轮,编码器安装在检测轮的同轴轴上。由于独立检测轮重量较轻,很容易发生跳动或打滑,导致测量误差。编码器现在安装在同轴从动轮上,没有法兰,如图2所示。
对于大面积龙门起重机,使用多组检查轮进行校准,以确保测量精度。同时,沿轨道校准位置设置限位开关触发点。极限触发系统将行进路径测量系统的行进值校正到该位置的对应值,以便校正行进路径测量体系中的误差并减少误差累积。3) 小型车行驶测量相当于测量大型车的轨迹,不同之处在于小型车的路径比大型车的路径小得多,小型车通常没有动力车轮。小型汽车对环境的影响低于大型汽车。在实践中,当汽车没有动力车轮时,通常使用独立的检测车轮。由于汽车良好的运行环境,独立检测轮在行程测量中也起到了很好的作用。小型汽车的位移测量不仅起到定位功能的作用,而且还起到在两个或多个小型汽车系统中操作的同步功能。小型汽车的位置测量也可以作为电子控制系统中物体碰撞保护的参数。
小结
本文分析了编码器的功能和分类,西安德伍拓自动化为大家介绍了编码器在大型船舶龙门起重机中的具体应用,它可以准确地进行闭环控制、同步控制和行程测量,使龙门起重机能够可靠、安全地工作。本文提出的编码器控制方法已在几台大型船舶龙门起重机上应用,取得了良好的效果。
了解更多
起重机编码器相关知识,敬请关注西安德伍拓自动化传动系统有限公司网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn