如何减少
磁编码器的角度误差?
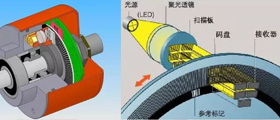
磁编码器在旋转轴中心、永磁体和霍尔元件中心位于同一直线上的轴端配置中,理论上是一个完美的圆,并且角度误差为零。但实际上,由于某些原因,图形不再是完美的圆,从而导致角度误差。

下面,西安德伍拓自动化技术人员将为大家解释使用磁性编码器的离轴配置的工作原理,磁性编码器由径向磁化的磁体和检测水平磁场强度的霍尔元件组成。
磁编码器周边有杂散磁场
由于从永磁体水平方向输入的杂散磁场的影响,会产生角度误差。
例如,如果在X轴方向输入杂散磁场,则的中心将在X轴方向偏移。此时,当旋转角度θ为0°和180°时,角度误差为零,但在其他情况下都会出现角度误差。
磁编码器霍尔元件的安装不对中
由于霍尔元件的安装未对准而产生角度误差。这是因为,由于霍尔元件和永磁体的中心发生位移,输入到霍尔元件的磁场发生畸变。
例如,如果霍尔元件在X轴方向上未对准,则当旋转角度θ为0°、90°、180°或270°时,角度误差为0。
然而,在0~90°和180~270°之间相位超前,在90~180°和270~0°之间相位滞后。
磁编码器霍尔元件的安装倾斜度
由于霍尔元件的安装倾斜而产生角度误差。霍尔元件和永磁体并没有相互偏移,但由于从倾斜方向输入的磁场变弱,变成椭圆。例如,当霍尔元件相对于X轴方向倾斜时,当旋转角度θ为0°和180°时,输入到霍尔元件的磁场变弱。而在 90° 和 270° 时,磁场强度不受倾斜的影响。结果,变成X方向上半径较小的椭圆。在这种情况下,当旋转角度θ为0°、90°、180°和270°时,角度误差为0。然而,在0~90°和180~270°之间相位超前,在90~180°和270~0°之间相位滞后。
相反,如果霍尔元件安装在正确的位置,即使永磁体未对准或倾斜,也不会出现角度误差。这是因为,即使磁铁错位地旋转,输入到霍尔元件的磁场的大小也不会根据角度而变化。结果,李萨如图形保持完美的圆形,并且不会出现角度误差。
然而,磁编码器检测到的水平磁场的大小变小,因此角度信息中包括的噪声误差分量变得相对较大。
磁编码器和电子元件的特性偏差
组成磁性编码器的霍尔元件和AD转换器都是电子元件。量产电子零件的电子特性因生产偏差而存在个体差异。
例如,霍尔元件的偏移会导致角度误差,其原因与杂散磁场的影响相同。用于检测 X 轴分量磁场的霍尔元件的灵敏度与用于检测 Y 轴分量磁场的霍尔元件的灵敏度之间的差异会导致角度误差,其原因与安装倾斜度相同霍尔元件。同样,AD转换器的偏移和灵敏度偏差也会导致角度误差。
了解更多
磁性编码器相关知识,敬请关注西安德伍拓自动化传动系统有限公司网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn