机器人关节处的
增量式编码器如何确定零位?
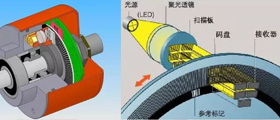
机械人关节臂都安装了标准的增量式编码器,这些编码器具备A、B、Z三相输出。然而,在每次调试机械腿时,如何确保编码器都精确地处于零位,这个问题该怎么解决呢?

图为机器人关节处编码器数据测试照片
如果仅使用普通的增量式编码器,确实“无法直接确定零位”(此处加引号,是因为后续会探讨可能的解决方案)。这是因为增量式编码器只能提供相对位置信息,而无法直接给出绝对位置。
相对位置是指相对于编码器自身定义的某个零点(为便于描述,我们称之为“伪零点”)的位置。但在大多数情况下,这个“伪零点”并不是我们希望为机器人设定的零点(即“真零点”)。
通常,“伪零点”是在机器人上电时由编码器立即确定的,编码器会将上电时的位置记录为零点。然而,如果我们想要设定“真零点”,就必须了解“伪零点”与“真零点”之间的位置差异。
以下是两种可能的解决方案:
1、添加传感器:
可以通过增加其他类型的传感器来获取这个位置差异。这些传感器可以是绝对编码器、光电开关或机械按钮开关等,只要能达到目的即可。尽管不同传感器的精度可能有所不同,但它们都能帮助我们找到期望的“真零点”(尽管可能存在一定的误差)。
2、通过机械限位:
另一种方案是不添加额外的传感器,而是让机器人的各个关节进行运动,直至达到关节的机械限位,此时力矩会显著增加。通过获取关节在限位时的位置值,并反算出关节限位值与零点位置时关节位置值的差异,从而进行“真零点”的标定。标定完成后,我们就能知道“真零点”在“伪零点”坐标系下的位置,进而通过相对编码器推算出绝对位置。(但这种方法可能存在较大的误差,在实际应用时,需要确保机械结构的强度,并注意安全。)
通过上述方法,我们可以更准确地确定机器人关节处增量式编码器的零位,从而提高机械腿的运动精度和可靠性。
了解更多
编码器相关知识,敬请关注西安德伍拓自动化传动系统有限公司网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。

 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn